常见的卷积结构
基本卷积
| No padding, no strides | Arbitrary padding, no strides | Half padding, no strides | Full padding, no strides |
 |
 |
 |
 |
| No padding, strides | Padding, strides | Padding, strides (odd) | |
 |
 |
 |
转置卷积
- 转置卷积(Transposed Convolution),又称反卷积(Deconvolution)、Fractionally Strided Convolution
- 转置卷积是卷积的逆过程,如果把基本的卷积(+池化)看做“缩小分辨率”的过程,那么转置卷积就是“扩充分辨率”的过程。
- 为了实现扩充的目的,需要对输入以某种方式进行填充。
- 转置卷积与数学上定义的反卷积不同——在数值上,它不能实现卷积操作的逆过程。其内部实际上执行的是常规的卷积操作。
- 转置卷积只是为了重建先前的空间分辨率,执行了卷积操作。
- 虽然转置卷积并不能还原数值,但是用于编码器-解码器结构中,效果仍然很好。——这样,转置卷积可以同时实现图像的粗粒化和卷积操作,而不是通过两个单独过程来完成。
| No padding, no strides, transposed | Arbitrary padding, no strides, transposed | Half padding, no strides, transposed | Full padding, no strides, transposed |
| No padding, strides, transposed | Padding, strides, transposed | Padding, strides, transposed (odd) | |
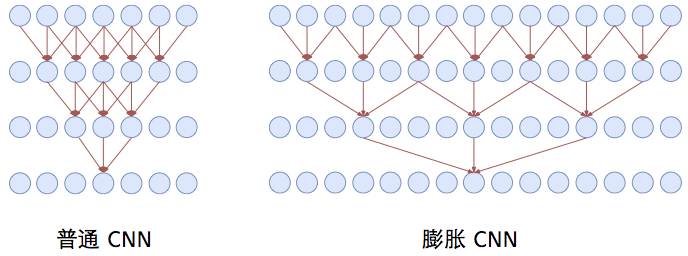
空洞卷积
- 空洞卷积(Atrous Convolutions)也称扩张卷积(Dilated Convolutions)、膨胀卷积。
No padding, no strides.
空洞卷积的作用
- 空洞卷积使 CNN 能够捕捉更远的信息,获得更大的感受野;
- 同时不增加参数的数量,也不影响训练的速度。
示例:Conv1D + 空洞卷积
可分离卷积
- 逐通道卷积
Depthwise Convolution的一个卷积核负责一个通道,一个通道只被一个卷积核卷积。
一张5×5像素、三通道彩色输入图片(shape为5×5×3),Depthwise Convolution首先经过第一次卷积运算,DW完全是在二维平面内进行。卷积核的数量与上一层的通道数相同(通道和卷积核一一对应)。所以一个三通道的图像经过运算后生成了3个Feature map(如果有same padding则尺寸与输入层相同为5×5),如下图所示。
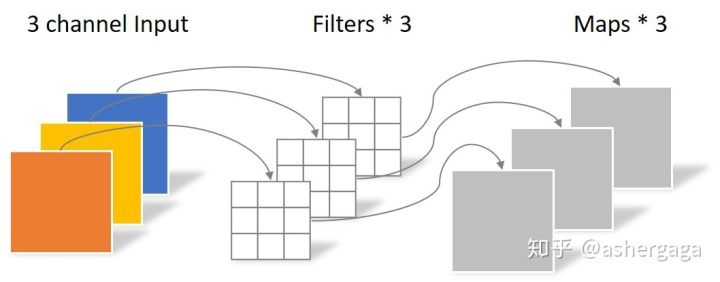
Depthwise Convolution完成后的Feature map数量与输入层的通道数相同,无法扩展Feature map。而且这种运算对输入层的每个通道独立进行卷积运算,没有有效的利用不同通道在相同空间位置上的feature信息。因此需要Pointwise Convolution来将这些Feature map进行组合生成新的Feature map。
- 逐点卷积
Pointwise Convolution的运算与常规卷积运算非常相似,它的卷积核的尺寸为 1×1×M,M为上一层的通道数。所以这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map。有几个卷积核就有几个输出Feature map。
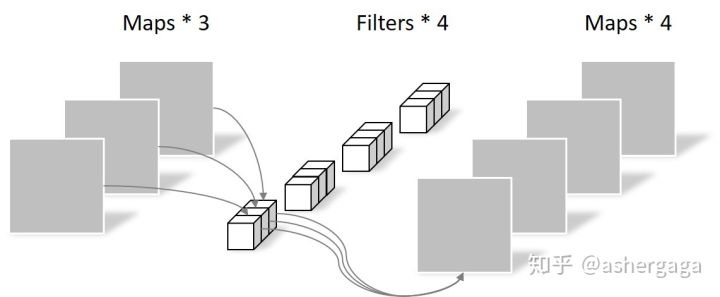
经过Pointwise Convolution之后,同样输出了4张Feature map,与常规卷积的输出维度相同。
门卷积
-
类似 LSTM 的过滤机制,实际上是卷积网络与门控线性单元(Gated Linear Unit)的组合。
-
核心公式

中间的运算符表示逐位相乘—— Tensorflow 中由
tf.multiply(a, b)实现,其中 a 和 b 的 shape 要相同;后一个卷积使用sigmoid激活函数。 -
一个门卷积 Block
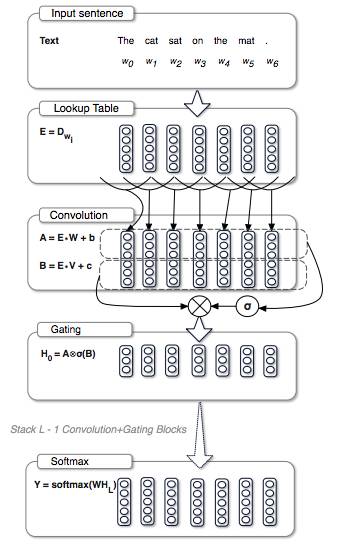
W和V表明参数不共享。 -
实践中,为了防止梯度消失,还会在每个 Block 中加入残差
门卷积的作用
- 减缓梯度消失
- 解决语言顺序依存问题
门卷积是如何防止梯度消失的
-
因为公式中有一个卷积没有经过激活函数,所以对这部分求导是个常数,所以梯度消失的概率很小。
-
如果还是担心梯度消失,还可以加入残差——要求输入输出的 shape 一致。

更直观的理解:
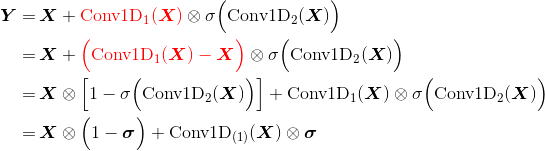
即信息以
1-σ的概率直接通过,以σ的概率经过变换后通过——类似 GRU因为
Conv1D(X)没有经过激活函数,所以实际上它只是一个线性变化;因此与Conv1D(X) - X是等价的
CNNs与DNNs
CNNs相对于DNNs的优点
-
CNNs的特征就是共享卷积核,对高维数据处理无压力。图像通过卷积操作后仍然保留原先的位置关系。
-
DNNs的输入是向量形式,并未考虑到平面的结构信息,在图像和NLP领域这一结构信息尤为重要,例如识别图像中的数字,同一数字与所在位置无关(换句话说任一位置的权重都应相同),CNNs的输入可以是tensor,例如二维矩阵,通过filter获得局部特征,较好的保留了平面结构信息。
CNNs结构总结
- 卷积层:对图像元素的矩阵变换,是提取图像特征的方法,多种卷积核可以提取多种特征。一个卷积核覆盖的原始图像的范围叫做感受野(权值共享)。一次卷积运算(哪怕是多个卷积核)提取的特征往往是局部的,难以提取出比较全局的特征,因此需要在一层卷积基础上继续做卷积计算 ,这也就是多层卷积。
- 池化层:降维的方法,按照卷积计算得出的特征向量维度大的惊人,不但会带来非常大的计算量,而且容易出现过拟合,解决过拟合的办法就是让模型尽量“泛化”,也就是再“模糊”一点,那么一种方法就是把图像中局部区域的特征做一个平滑压缩处理,这源于局部图像一些特征的相似性(即局部相关性原理)。
- 全连接层:softmax分类
- 训练过程:卷积核中的因子(×1或×0)其实就是需要学习的参数,也就是卷积核矩阵元素的值就是参数值。一个特征如果有M个值,N个特征就有M*N个值,再加上多个层,需要学习的参数还是比较多的。
- CNNs filter尺寸计算:Feature Map的尺寸等于
(input_size + 2 * padding_size − filter_size)/stride + 1
The link of this page is https://blog.nooa.tech/articles/7203e497/ . Welcome to reproduce it!